Лабораторная работа 3, страница 22 - гдз по физике 11 класс тетрадь для лабораторных работ Жилко, Маркович
Авторы: Жилко В. В., Маркович Л. Г., Егорова Л. П.
Тип: Тетрадь для лабораторных работ
Серия: рабочие тетради
Издательство: Аверсэв
Год издания: 2022 - 2025
Цвет обложки: белый, сиреневый
ISBN: 978-985-19-6276-7
Рекомендовано Научно-методическим учреждением «Национальный институт образования» Министерства образования Республики Беларусь
Популярные ГДЗ в 11 классе
Лабораторная работа 3. Измерение жесткости пружины на основе закономерностей колебаний пружинного маятника - страница 22.
Лабораторная работа 3 (с. 22)
Решение. Лабораторная работа 3 (с. 22)

Решение 2. Лабораторная работа 3 (с. 22)
Вывод расчетных формул
Период собственных колебаний пружинного маятника определяется формулой:
$T = 2\pi\sqrt{\frac{m}{k}}$
где $m$ – масса груза; $k$ – жесткость пружины.
Зная связь между частотой $\nu$ и периодом колебаний $T$: $\nu = \frac{1}{T}$, и выразив $k$ из первой формулы, найдем формулу для определения жесткости пружины $k$:
$k = \frac{4\pi^2m}{T^2}$
где $T = \frac{t}{n}$, $t$ – промежуток времени, в течение которого маятник совершил $n$ полных колебаний. Тогда $k$ может быть выражено как:
$k = \frac{4\pi^2mn^2}{t^2}$
Порядок выполнения работы
1. Определите массу одного груза из набора грузов по механике 3–5 раз с помощью весов. Результаты измерения массы запишите в таблицу.
Для определения массы груза следует использовать лабораторные весы. Необходимо взвесить один груз несколько раз (3-5), чтобы минимизировать случайные погрешности и получить более точное среднее значение. Результаты каждого измерения массы $m_i$ записываются в соответствующую строку таблицы в столбце "m, кг".
Ответ: Результаты измерений заносятся в таблицу.
2. Отклоните груз вниз на расстояние, равное примерно 2 см, и отпустите его.
Данный пункт описывает начальное условие для запуска колебаний. Груз, подвешенный на пружине, аккуратно смещается вниз от положения равновесия на небольшое расстояние (примерно 2 см) и затем отпускается без начального толчка. Это обеспечивает начало свободных гармонических колебаний.
Ответ: Действие, запускающее колебания.
3. Измерьте 3–5 раз время $t$, необходимое для совершения $n = 10$ полных колебаний. Результаты измерения времени и числа колебаний запишите в таблицу.
После запуска колебаний маятника необходимо измерить время, за которое пружинный маятник совершит определенное количество полных колебаний ($n = 10$). Измерение времени производится с помощью секундомера. Для повышения точности рекомендуется проводить несколько измерений времени ($3-5$ раз) для одного и того же числа колебаний $n$. Это позволяет учесть случайные ошибки и найти среднее значение времени. Зафиксированное число колебаний $n$ (в данном случае 10) и измеренное время $t_i$ для каждого опыта заносятся в таблицу.
Ответ: Результаты измерений заносятся в таблицу.
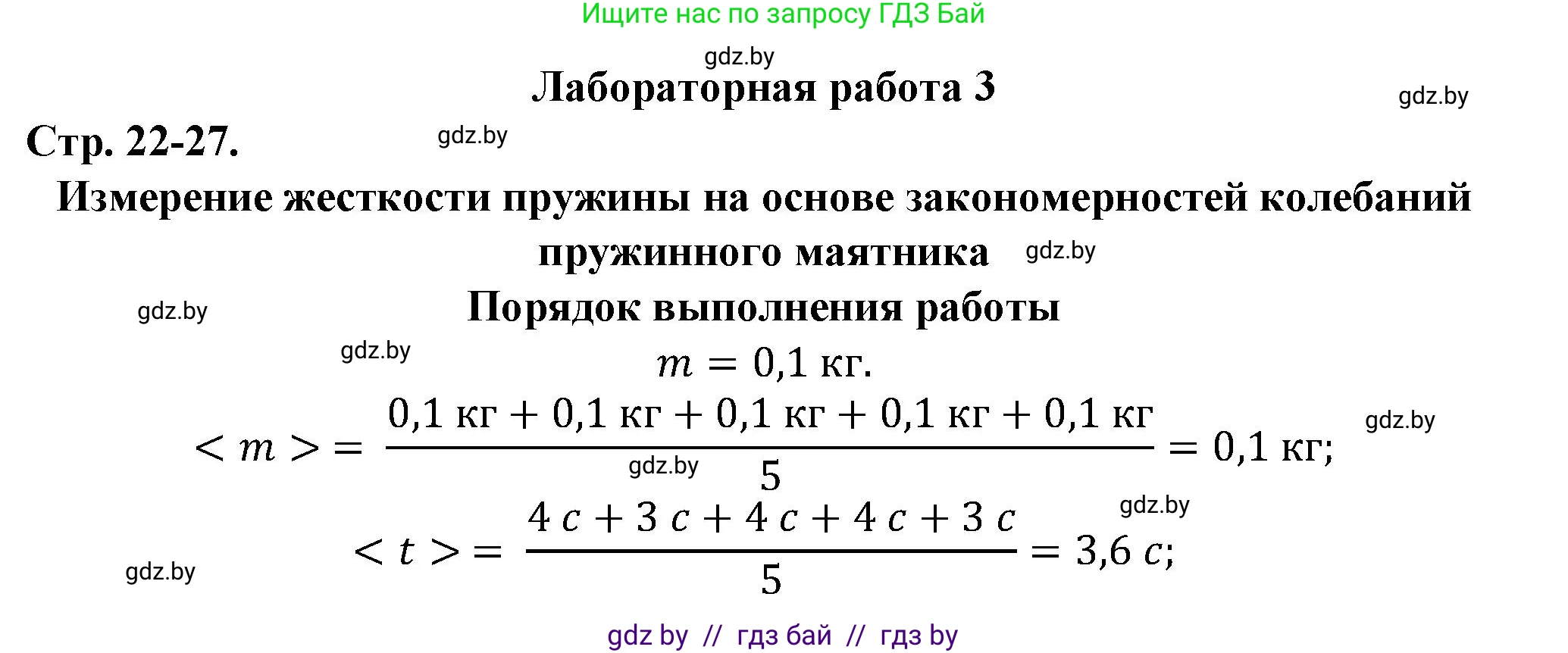
4. Вычислите средние значения массы $\langle m \rangle$ груза и времени $\langle t \rangle$ для $n$ полных колебаний. Результаты вычислений запишите в таблицу.
Дано: Измеренные значения массы груза $m_1, m_2, \dots, m_{N_m}$ и времени $t_1, t_2, \dots, t_{N_t}$ для $n$ колебаний.
Перевод в СИ: Масса должна быть в килограммах (кг), время в секундах (с).
Найти: Среднее значение массы $\langle m \rangle$ и среднее значение времени $\langle t \rangle$.
Решение: Средние значения массы и времени вычисляются как арифметическое среднее всех проведенных измерений.
Средняя масса: $\langle m \rangle = \frac{\sum_{i=1}^{N_m} m_i}{N_m}$
Среднее время: $\langle t \rangle = \frac{\sum_{i=1}^{N_t} t_i}{N_t}$
где $N_m$ – количество измерений массы, $N_t$ – количество измерений времени.
Полученные средние значения заносятся в соответствующие столбцы таблицы ((<m>, кг) и (<t>, с)).
Ответ: Результаты вычислений заносятся в таблицу.
5. Вычислите период колебаний по формуле: $\langle T \rangle = \frac{\langle t \rangle}{n}$. Результат вычисления запишите в таблицу.
Дано: Среднее значение времени $\langle t \rangle$ и число полных колебаний $n = 10$.
Перевод в СИ: Время $\langle t \rangle$ должно быть в секундах (с).
Найти: Средний период колебаний $\langle T \rangle$.
Решение: Период колебаний – это время одного полного колебания. Он вычисляется делением общего времени $\langle t \rangle$, затраченного на $n$ колебаний, на число этих колебаний $n$.
$\langle T \rangle = \frac{\langle t \rangle}{n}$
Вычисленное значение периода заносится в таблицу в столбец (<T>, с)).
Ответ: Результат вычисления заносится в таблицу.
6. Используя формулу $\langle k \rangle = \frac{4\pi^2mn^2}{\langle t \rangle^2}$, вычислите среднюю жесткость пружины $\langle k \rangle$. Результат вычисления запишите в таблицу.
Дано: Среднее значение массы $\langle m \rangle$, число колебаний $n = 10$, среднее значение времени $\langle t \rangle$. Константа $\pi \approx 3.14159$.
Перевод в СИ: Масса $\langle m \rangle$ в килограммах (кг), время $\langle t \rangle$ в секундах (с). Жесткость будет получена в Ньютонах на метр (Н/м).
Найти: Средняя жесткость пружины $\langle k \rangle$.
Решение: Для вычисления средней жесткости пружины используется формула, выведенная в начале работы, подставляя средние значения массы и времени.
$\langle k \rangle = \frac{4\pi^2\langle m \rangle n^2}{\langle t \rangle^2}$
Полученное значение жесткости заносится в таблицу в столбец (<k>, Н/м)).
Ответ: Результат вычисления заносится в таблицу.
7. Рассчитайте абсолютную погрешность измерения массы груза: $\Delta m = \Delta_и m + \Delta_о m$. Результат вычисления запишите в таблицу.
Дано: Инструментальная погрешность весов $\Delta_и m$ (обычно половина наименьшего деления или указанная в паспорте прибора), измеренные значения массы $m_i$.
Перевод в СИ: Все погрешности должны быть в килограммах (кг).
Найти: Абсолютная погрешность измерения массы $\Delta m$.
Решение: Абсолютная погрешность измерения массы складывается из инструментальной погрешности ($\Delta_и m$) и случайной погрешности ($\Delta_о m$).
Инструментальная погрешность $\Delta_и m$ определяется точностью используемых весов (например, для электронных весов это может быть минимальный шаг измерения, для лабораторных весов - половина наименьшего деления).
Случайная погрешность $\Delta_о m$ для серии измерений может быть оценена как полуразмах ($ \Delta_о m = \frac{m_{max} - m_{min}}{2} $) или с помощью статистических методов (например, стандартное отклонение среднего). Если измерений было всего 3-5, часто используют полуразмах.
$\Delta m = \Delta_и m + \Delta_о m$
Вычисленное значение абсолютной погрешности массы заносится в таблицу в столбец "Δm, кг".
Ответ: Результат вычисления заносится в таблицу.
8. Рассчитайте абсолютную погрешность измерения времени, за которое было совершено $n$ колебаний: $\Delta t = \Delta_и t + \Delta_о t$. Результат вычисления запишите в таблицу.
Дано: Инструментальная погрешность секундомера $\Delta_и t$ (обычно 0.1 с или 0.01 с), измеренные значения времени $t_i$.
Перевод в СИ: Все погрешности должны быть в секундах (с).
Найти: Абсолютная погрешность измерения времени $\Delta t$.
Решение: Абсолютная погрешность измерения времени складывается из инструментальной погрешности ($\Delta_и t$) и случайной погрешности ($\Delta_о t$).
Инструментальная погрешность $\Delta_и t$ определяется точностью секундомера (например, 0.1 с или 0.01 с).
Случайная погрешность $\Delta_о t$ для серии измерений времени может быть оценена как полуразмах ($ \Delta_о t = \frac{t_{max} - t_{min}}{2} $) или с помощью статистических методов.
$\Delta t = \Delta_и t + \Delta_о t$
Вычисленное значение абсолютной погрешности времени заносится в таблицу в столбец "Δt, с".
Ответ: Результат вычисления заносится в таблицу.
9. Вычислите относительную погрешность измерения жесткости пружины: $\varepsilon_k = \frac{\Delta m}{\langle m \rangle} + \frac{2\Delta t}{\langle t \rangle}$. Результат вычисления запишите в таблицу.
Дано: Абсолютная погрешность массы $\Delta m$, средняя масса $\langle m \rangle$, абсолютная погрешность времени $\Delta t$, среднее время $\langle t \rangle$.
Перевод в СИ: Все значения должны быть в СИ, но относительная погрешность является безразмерной величиной.
Найти: Относительная погрешность измерения жесткости пружины $\varepsilon_k$.
Решение: Относительная погрешность косвенного измерения жесткости вычисляется по формуле, полученной из правила нахождения погрешности произведения/частного величин. Формула для жесткости $k = \frac{4\pi^2mn^2}{t^2}$. Константы $4\pi^2$ и $n^2$ не вносят относительной погрешности.
Таким образом, относительная погрешность жесткости равна сумме относительных погрешностей входящих величин, при этом относительная погрешность времени удваивается, так как время возводится в квадрат (показатель степени берется по модулю).
$\varepsilon_k = \frac{\Delta m}{\langle m \rangle} + \frac{2\Delta t}{\langle t \rangle}$
Результат обычно выражается в процентах ($\varepsilon_k \cdot 100\%$). Вычисленное значение заносится в таблицу в столбец "εk, %".
Ответ: Результат вычисления заносится в таблицу.
10. Вычислите абсолютную погрешность измерения жесткости пружины: $\Delta k = \varepsilon_k \cdot \langle k \rangle$. Результат вычисления запишите в таблицу.
Дано: Относительная погрешность измерения жесткости $\varepsilon_k$ и среднее значение жесткости $\langle k \rangle$.
Перевод в СИ: Жесткость $\langle k \rangle$ в Н/м. Абсолютная погрешность будет в Н/м.
Найти: Абсолютная погрешность измерения жесткости $\Delta k$.
Решение: Абсолютная погрешность косвенного измерения величины вычисляется как произведение ее среднего значения на относительную погрешность (выраженную в долях единицы, а не в процентах).
$\Delta k = \varepsilon_k \cdot \langle k \rangle$
Вычисленное значение абсолютной погрешности жесткости заносится в таблицу в столбец "Δk, Н/м".
Ответ: Результат вычисления заносится в таблицу.
11. Запишите значение жесткости пружины и относительной погрешности ее измерения в виде: $k = (\langle k \rangle \pm \Delta k) \frac{Н}{М}$, $\varepsilon_k = \dots\%$.
Дано: Среднее значение жесткости $\langle k \rangle$, абсолютная погрешность жесткости $\Delta k$, относительная погрешность жесткости $\varepsilon_k$.
Перевод в СИ: $\langle k \rangle$ и $\Delta k$ в Н/м. $\varepsilon_k$ в процентах.
Найти: Окончательное значение жесткости пружины с указанием абсолютной и относительной погрешности.
Решение: Результат измерения физической величины с учетом погрешности принято записывать в стандартном виде. Абсолютная погрешность $\Delta k$ округляется до одной значащей цифры, а среднее значение $\langle k \rangle$ округляется до того же разряда. Относительная погрешность $\varepsilon_k$ обычно указывается в процентах, округленная до двух значащих цифр.
Например: $k = (\langle k \rangle \pm \Delta k) \frac{Н}{М}$, $\varepsilon_k = \varepsilon_k \cdot 100\%$.
Ответ: Окончательное значение жесткости пружины записывается в указанном формате.
Контрольные вопросы
1. По какому закону происходят колебания тела, подвешенного на пружине? Ответ обоснуйте.
Колебания тела, подвешенного на пружине (пружинный маятник), происходят по закону гармонических колебаний. Это означает, что смещение тела от положения равновесия изменяется со временем по синусоидальному или косинусоидальному закону. Обоснование: на тело, отклоненное от положения равновесия, действует возвращающая сила упругости пружины, которая согласно закону Гука пропорциональна смещению $x$ от положения равновесия и направлена к нему: $F_у = -kx$. Кроме того, действует сила тяжести $F_т = mg$. В положении равновесия $kx_0 = mg$. При смещении на $x$ от положения равновесия суммарная возвращающая сила $F = F_у' - mg = k(x_0+x) - mg = kx_0 + kx - mg = kx$. Это приводит к уравнению движения $m\frac{d^2x}{dt^2} = -kx$, которое является дифференциальным уравнением гармонических колебаний. Решением этого уравнения является $x(t) = A\cos(\omega t + \phi)$, где $A$ – амплитуда, $\omega = \sqrt{\frac{k}{m}}$ – круговая частота.
Ответ: Колебания происходят по закону гармонических колебаний, так как возвращающая сила пропорциональна смещению от положения равновесия и направлена к нему.
2. Зависит ли частота колебаний пружинного маятника от амплитуды колебаний? Ответ обоснуйте.
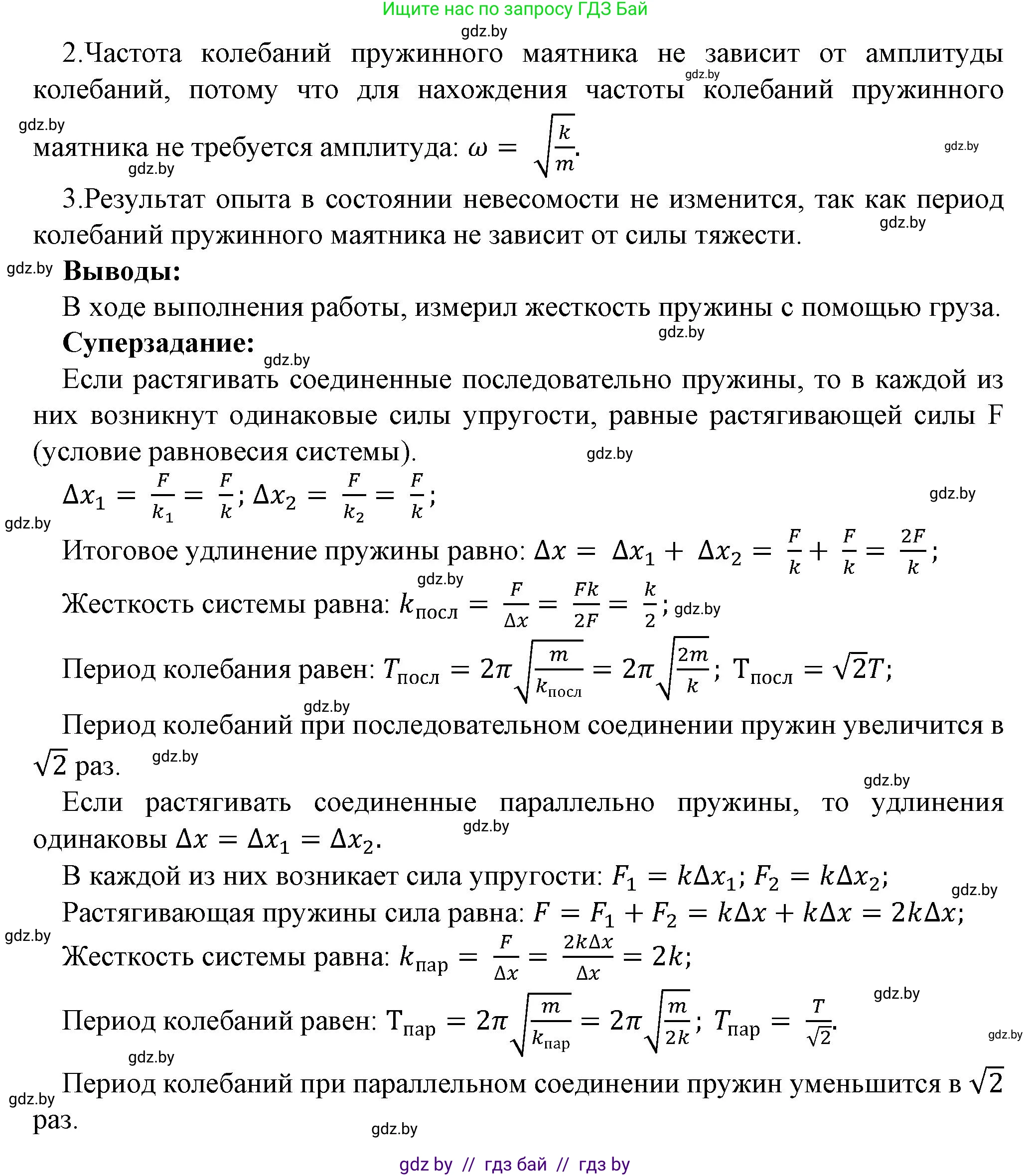
В идеальном пружинном маятнике (при малых амплитудах, когда закон Гука строго соблюдается, и при отсутствии затухания) частота колебаний не зависит от амплитуды. Обоснование: круговая частота $\omega$ пружинного маятника определяется формулой $\omega = \sqrt{\frac{k}{m}}$, а линейная частота $\nu = \frac{\omega}{2\pi} = \frac{1}{2\pi}\sqrt{\frac{k}{m}}$. Как видно из этих формул, частота зависит только от жесткости пружины $k$ и массы груза $m$. Амплитуда колебаний $A$ в этих формулах отсутствует. Таким образом, для идеального гармонического осциллятора частота является постоянной величиной. На практике при очень больших амплитудах закон Гука может нарушаться, и затухание может влиять на наблюдаемый период, но в рамках теории гармонических колебаний зависимость отсутствует.
Ответ: В идеальном пружинном маятнике частота колебаний не зависит от амплитуды, так как определяется только жесткостью пружины и массой груза ($ \nu = \frac{1}{2\pi}\sqrt{\frac{k}{m}} $).
3. Каким бы был результат выполнения данной работы в условиях невесомости?
В условиях невесомости отсутствует сила тяжести. Для пружинного маятника это означает, что положение равновесия пружины не будет смещено под действием веса груза. Однако, если груз изначально прикреплен к пружине и выведен из положения равновесия (пусть это будет естественная длина пружины, если ее не растягивает сила тяжести), то сила упругости пружины по-прежнему будет действовать на груз, стремясь вернуть его в положение равновесия. Колебания будут происходить по тому же закону гармонических колебаний, и период будет определяться той же формулой $T = 2\pi\sqrt{\frac{m}{k}}$. Таким образом, основные физические принципы и формулы для определения жесткости пружины останутся неизменными. Выполнение данной работы, направленной на измерение жесткости $k$ через измерение $T$ и $m$, было бы возможно и дало бы аналогичный результат. Различие заключалось бы только в том, что положение равновесия совпадало бы с ненагруженным состоянием пружины.
Ответ: В условиях невесомости колебания пружинного маятника продолжались бы, и его период определялся бы той же формулой $T = 2\pi\sqrt{\frac{m}{k}}$. Работа по измерению жесткости пружины была бы возможна и дала бы тот же результат, поскольку жесткость пружины не зависит от гравитации.
Выводы:
В ходе данной лабораторной работы были изучены закономерности колебаний пружинного маятника. Экспериментально определена жесткость пружины, используя измерения массы груза и времени, необходимого для совершения определенного числа колебаний. Методика определения жесткости основана на формуле периода гармонических колебаний пружинного маятника. Произведен расчет абсолютных и относительных погрешностей, что позволило оценить точность полученного результата. Результаты подтверждают теоретические представления о зависимости периода колебаний от массы груза и жесткости пружины, а также о независимости периода от амплитуды для малых колебаний. Окончательное значение жесткости пружины представлено с учетом вычисленных погрешностей.
Суперзадание
Как изменится период колебания груза на пружине, если две пружины соединить параллельно? Последовательно? Ответ обоснуйте теоретически и проверьте экспериментально.
1. Параллельное соединение пружин:
Теоретическое обоснование: При параллельном соединении двух пружин (жесткостями $k_1$ и $k_2$) к грузу прикладывается суммарная возвращающая сила от обеих пружин. Если груз смещается на расстояние $x$, каждая пружина растягивается на $x$. Суммарная сила $F = F_1 + F_2 = k_1x + k_2x = (k_1 + k_2)x$. Таким образом, эквивалентная жесткость системы $k_{пар}$ равна сумме жесткостей отдельных пружин: $k_{пар} = k_1 + k_2$. Если пружины идентичны ($k_1 = k_2 = k$), то $k_{пар} = 2k$.
Период колебаний пружинного маятника определяется формулой $T = 2\pi\sqrt{\frac{m}{k}}$. Подставив $k_{пар}$ вместо $k$, получим новый период $T_{пар} = 2\pi\sqrt{\frac{m}{k_{пар}}} = 2\pi\sqrt{\frac{m}{k_1 + k_2}}$.
Если $k_{пар} > k$, то $T_{пар} < T$. Следовательно, период колебаний уменьшится, и колебания станут более быстрыми.
Экспериментальная проверка: Чтобы проверить это экспериментально, необходимо сначала определить жесткость каждой пружины по отдельности (как это было сделано в основной части работы). Затем следует соединить пружины параллельно, подвесить тот же груз и измерить новый период колебаний. Сравнив измеренный $T_{пар}$ с теоретически предсказанным значением, можно подтвердить или опровергнуть зависимость.
Ответ: При параллельном соединении пружин эквивалентная жесткость системы увеличивается ($k_{пар} = k_1 + k_2$), что приводит к уменьшению периода колебаний ($T_{пар} < T$) и более быстрым колебаниям.
2. Последовательное соединение пружин:
Теоретическое обоснование: При последовательном соединении двух пружин (жесткостями $k_1$ и $k_2$) сила, действующая на каждую пружину, одинакова ($F$). Однако общее удлинение системы $x$ складывается из удлинений каждой пружины: $x = x_1 + x_2$. Из закона Гука $x = F/k$, поэтому $F/k_{посл} = F/k_1 + F/k_2$. Деля на $F$, получаем формулу для эквивалентной жесткости: $\frac{1}{k_{посл}} = \frac{1}{k_1} + \frac{1}{k_2}$. Если пружины идентичны ($k_1 = k_2 = k$), то $\frac{1}{k_{посл}} = \frac{2}{k}$, откуда $k_{посл} = \frac{k}{2}$.
Период колебаний пружинного маятника $T = 2\pi\sqrt{\frac{m}{k}}$. Подставив $k_{посл}$ вместо $k$, получим новый период $T_{посл} = 2\pi\sqrt{\frac{m}{k_{посл}}} = 2\pi\sqrt{m\left(\frac{1}{k_1} + \frac{1}{k_2}\right)}$.
Если $k_{посл} < k$, то $T_{посл} > T$. Следовательно, период колебаний увеличится, и колебания станут более медленными.
Экспериментальная проверка: Для экспериментальной проверки следует также сначала определить жесткость каждой пружины. Затем соединить их последовательно, подвесить тот же груз и измерить новый период колебаний. Сравнение измеренного $T_{посл}$ с теоретическим значением поможет подтвердить или опровергнуть зависимость.
Ответ: При последовательном соединении пружин эквивалентная жесткость системы уменьшается ($\frac{1}{k_{посл}} = \frac{1}{k_1} + \frac{1}{k_2}$), что приводит к увеличению периода колебаний ($T_{посл} > T$) и более медленным колебаниям.
Другие задания:
Помогло решение? Оставьте отзыв в комментариях ниже.
Присоединяйтесь к Телеграм-группе @gdz_by_belarus
ПрисоединитьсяМы подготовили для вас ответ c подробным объяснением домашего задания по физике за 11 класс, для упражнения Лабораторная работа 3 расположенного на странице 22 к тетради для лабораторных работ серии рабочие тетради 2022 года издания для учащихся школ и гимназий.
Теперь на нашем сайте ГДЗ.ТОП вы всегда легко и бесплатно найдёте условие с правильным ответом на вопрос «Как решить ДЗ» и «Как сделать» задание по физике к упражнению Лабораторная работа 3 (с. 22), авторов: Жилко (Виталий Владимирович), Маркович (Леонид Григорьевич), Егорова (Лариса Петровна), учебного пособия издательства Аверсэв.